您好!歡迎來到襄陽海特測控技術(shù)有限公司
 官方直營
官方直營 全國聯(lián)保 關(guān)于我們 | 聯(lián)系我們
全國聯(lián)保 關(guān)于我們 | 聯(lián)系我們 
如何使用傾角傳感器技術(shù)來測量載體的角度呢
來源:www.clshcw.com | 發(fā)布時間:2021年09月16日傾角傳感器 的主要 物理原理:傾角傳感器 利用 傳感器 芯片 收集 重力加速度 在傳感器 比較敏感 軸上的分量 大小 ,利用 操縱 單元 對芯片 傳送 的脈沖信號 進行 處理 ,計算 出傾角 大小 ,再通過 通訊 單元 轉(zhuǎn)換 到網(wǎng)絡(luò) ,總線 接口 或顯示屏 上。
傾角傳感器 的角度計算 :依據(jù) 物理力學(xué)基本原理 基本原理 明白 ,當目標 與基準點 平面 有一個 角度 的夾角 時,其運作 方向 的加速度 與重力加速度 的比值 和沒有 夾角 時其加速度 與重力加速度 的夾角 α是有所不同 的。 依據(jù) 力的分解 ,重力加速度 便會 有分量 作用 在Ax方向 ,且Ax=gsinα,因此 基本原理 獲得 傾斜角 α=sin-1(Ax/g)。
依據(jù) 該基本原理 我們知道,傾角傳感器 具備 兩個 基本特征 :
1、傾角傳感器 測旋轉(zhuǎn) 是以水平面 軸為基準點 的,因此 傳感器 不用 安裝 在載體 的旋轉(zhuǎn)軸 上,這對載體 的測量 安裝 提供 較大 的便捷 。
2、傾斜角 α能夠 正確 反映 載體 姿態(tài) 的變化 的先決條件 是載體 處于 靜止 模式 ,所有 運作 ,振動 等運作 都會 導(dǎo)致 姿態(tài) 角測量 不準確 。

大家 在選型 的過程 中必須 明白 傳感器 的這些 物理 基本特征 :重要的是使用 環(huán)境 的規(guī)定 ,是靜態(tài) 測量 還是 動態(tài) 測量 ? 靜態(tài) 測量 選用 靜態(tài) 傾角傳感器 ,動態(tài) 測量 選用 動態(tài) 傾角傳感器 。
靜態(tài) 測量 和動態(tài) 測量 ,通常 都會有 個較大 的測量 角度 ,基本原理 依據(jù) 這個 較大 測量范圍 選取合適 的傳感器 ,通常 依據(jù) 傾角傳感器 的量程 來選取 。
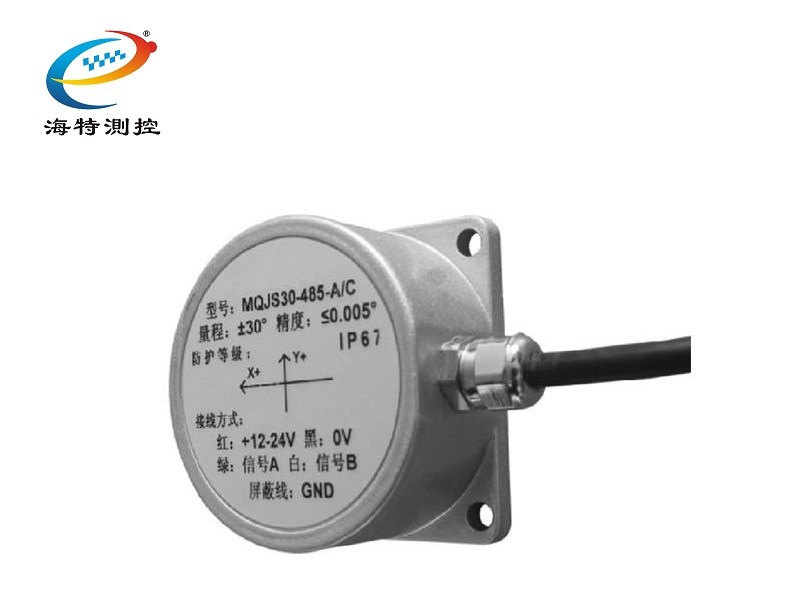
通常 傾角傳感器 產(chǎn)品 的量程 有±15 °,±30 °,±90 °,±180 °,±360 °不等 ,測量 的量程合適 ,才能夠 達到較佳的性價比 。
靜態(tài) 測量 和動態(tài) 測量 ,在有所不同 的應(yīng)用場景 ,對測量 的精度 規(guī)定 也有所不同 。
通常 靜態(tài) 傾角傳感器 的精度 通常 較高,基本原理 到0. 1度,0. 01 度。 針對 相同 系列 的產(chǎn)品 中,精度 越高,價格 相對來說 也越高。
靜態(tài) 測量 和動態(tài) 測量 ,在有所不同 的應(yīng)用場景 ,對測量 的分辨率 規(guī)定 也有所不同 。
通常情況下 分辨率 依據(jù) 必須 讀取數(shù)據(jù) 的規(guī)定,通常 分辨率 高的傾角傳感器 ,可讀取數(shù)據(jù) 位數(shù) 也越多 。
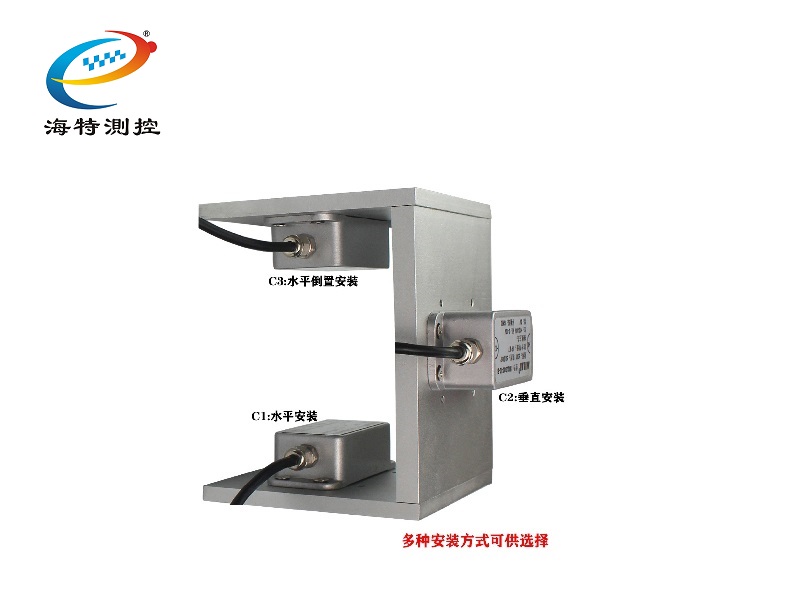
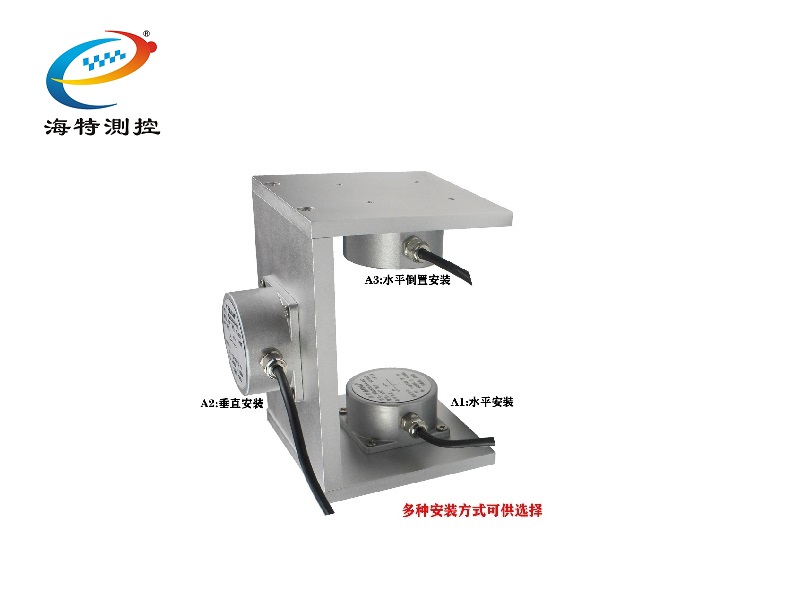
不論是 靜態(tài) 或是 動態(tài) 測量 ,傾角傳感器 的安裝 方式 不同 致使 我們 必須 的軸向 也不同 ,通常 有水平 安裝 和垂直 安裝 ,水平 安裝 必須 通常 運用 雙軸 相傳感器 ,雙軸 相傾角傳感器 ,輸出 一個是X軸,另一個是y軸。 每一個 軸顯示 相對 于水平面 的傾斜角。
上一條:
傾角傳感器主要用于載體角度的測量和角度的調(diào)整
下一條:
一文簡述單軸傾角傳感器的工作原理
【相關(guān)文章】
【相關(guān)產(chǎn)品】



+
 微信號:18307109917
微信號:18307109917

微信號:18307109917
添加微信好友,詳細了解產(chǎn)品。
 添加微信
添加微信
 聯(lián)系我們
聯(lián)系我們
 電話咨詢
電話咨詢